Basic Control Theory

Contents
Computers in Controls
A look at the more recent developments in control involving the use of information technology.
It may be appropriate to end Block 5 with a broad look at the involvement of computers in control systems.
A dictionary definition of the term ‘computer’ is ‘a programmable electronic device that can store, retrieve, and process data’.
This definition includes the basic, single- and multi-loop controllers commonly found in process industries where a condition is read by a sensor, compared to a set point in the controller via some mathematical routines performed to determine the corrective action required, followed by an output of an appropriate signal.
The development rate of the computer chip and its impact on all aspects of life is well known. The rate of advancement in controls technology surely means that some of the following comments will be redundant when read.
History
Stand-alone, single loop controllers date back to pneumatic controllers, which, through the ingenious use of flaps and nozzles, could approximate the basic PID functions. These complex and expensive controllers were often found in large petrochemical plants where accurate control of the process, as well as intrinsic safety (the absence of sparks which could initiate a fire) was essential.
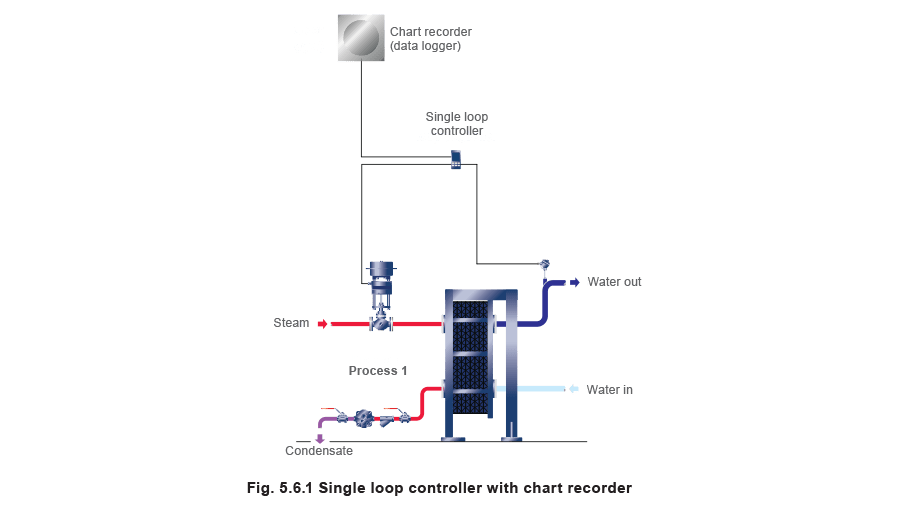
Often, these processes were individually connected to local circular chart recorders (Figure 5.6.1); alternatively, a number of processes were connected to multi-pen recorders in control rooms (Figure 5.6.2). While the multi-pen recorders enabled a number of parameters to be reviewed together, the mechanisms in the instrument and the number of lines on one chart effectively limited their use to approximately twelve inputs.

The first computers used in control systems replaced the main control room chart recorders. They gathered information (or data) from a much greater number of points around the plant. They were generally referred to as ‘data loggers’ (Figure 5.6.3), and had no input to the plant operation.
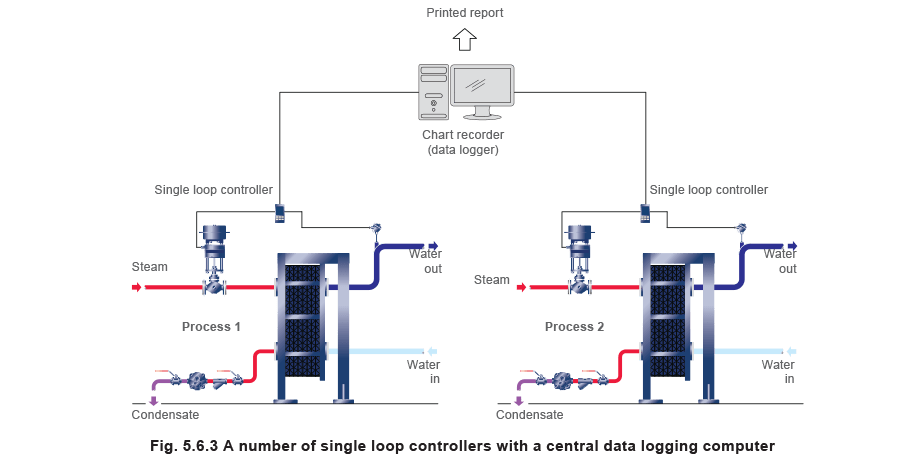
These early computers were usually programmed to print out reports at specific time intervals on continuous computer listing paper. By manually extracting the data from the computer print-outs, the plant manager was able to review the operation of his plant as a whole, comparing the performance of different parts of the plant, looking for deterioration in performance, which would indicate the need for a shutdown, etc.
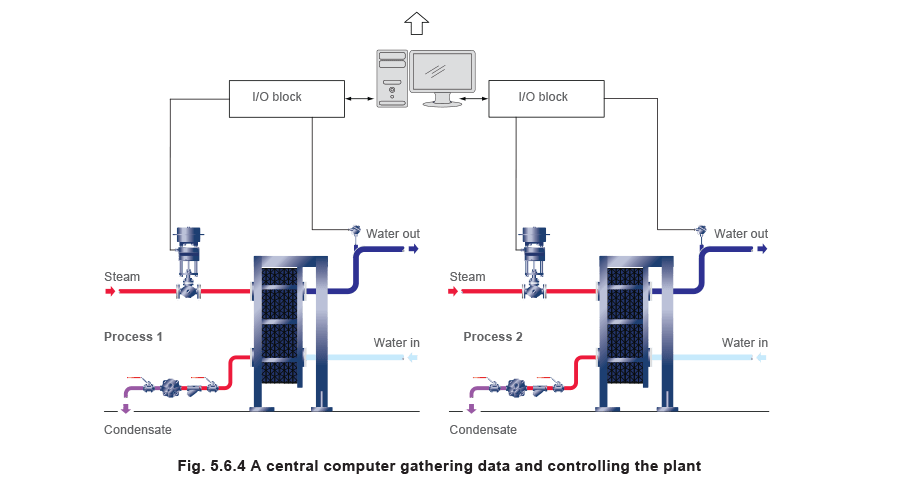
In the mid 1970’s, a number of well-known instrument companies began marketing digital control systems. These systems utilised a central computer unit, which took inputs from sensors, performed mathematical routines, and provided an output to various relevant controlling devices. They also maintained a record of events for review (see Figure 5.6.4).
Important notes:
- A personal computer (PC) cannot accept the raw instrument signals (4 - 20 mA, 0 - 10 V) from a control device. An Input / Output (I / O) device was required to ‘translate’ between the two. Each of the I / O manufacturers had a unique means of achieving this, which meant that the systems were not quite as compatible as had been intended.
- In the beginning, the I / O devices were in the plant’s main control room, and each individual piece of equipment was connected to the main control room by its own individual signal cable. This meant that on a large plant, the cable installation and management was an important issue, in terms of its physical volume and corresponding cost.
- As technology progressed, the I/O device moved out to the plant, and the amount of cabling to the control room was reduced, but was still significant.
These Digital Control Systems led to the development of:
- Distributed Control Systems (DCS)
- Supervisory Control And Data Acquisition (SCADA) systems, and
- Building Management Systems (BMS)
... all of which are in prolific use today (see Figure 5.6.5).

A giant leap forward occurred in the late 1980’s with the introduction of the PC and the Windows screen environment and computer operating system. This provided a standard platform for the earlier digital control systems, as all the instrument companies needed to work in a common format. The advantage of the ‘Windows’ based systems was that information was exchangeable in the same way that today’s personal computer user can freely exchange data between Word, ‘Excel’ and ‘PowerPoint’. This data exchange ‘language’ was termed Dynamic Data Exchange (DDE), and subsequently developed into Object Linking and Embedding (OLE). This was further modified for process control to become OLE for Process Control (OPC), which is still used at the time of writing.
The use of PCs also meant that the options for viewing history were considerably easier. Instead of being confined to print-outs and manual transfer data, the plant manager could use powerful graphing programs, analyse trends, add colours, adjust scales and use symbols; different variables could be plotted against each other, and the performance of different plants compared.
Modern automation systems utilise the computer as a ‘Window’ on the process. The operator uses the computer to monitor what is happening on the plant as a whole, and revise set-points and control parameters, such as PID, of individual plant based controllers, thus leaving the individual controllers to run the PID algorithms and control logic.
Consequently stand-alone controllers still have a place in modern automation systems as they are in final control, but the controller usually takes the form of a PLC (Programmable Logic Controller) or a multi-loop rack mounted device. These are quite different in appearance to single loop PID controllers. Rather than an operator using a keypad to change the set point and other control parameters at the controller, they are changed by an operator at a computer, which electronically downloads the required parameter to the controller. In the event of a central computer failure, the stand-alone controller would continue with its current parameters or go to a safe condition, thus ensuring that the plant continued to operate safely.
The next major step forward was a system known as ‘Fieldbus’.
Fieldbus uses a single digital cable system, which connects every item (see Figure 5.6.6).

Each item (sensor, controller and controlled device) is given a unique address, which is used to either request information (perhaps from a sensor) or to take some action (perhaps close a control valve).
However, these systems are complex and can be expensive. A Fieldbus network needs a master controller to organise the communications and control logic on the Fieldbus. It also needs a way of interfacing the Fieldbus to computer networks so information can be shared (see Figure 5.6.8). A device that combines the role of Fieldbus controller and provides the bridge to a PC network is called a ‘bridge’ or ‘master controller’, (see Figure 5.6.7).


On the process side the bridge can:
- Request and receive data from a number of sensors.
- Use this information in complex mathematical routines to determine and transmit the required corrective action to control devices such as valves.
- Can request the equipment to initiate a diagnostic routine, and report.
On the computer network side it can provide:
- Historical data of equipment, such as date and result of recent diagnostic routines.
- Alarms when the process or equipment exceeds set parameters.
- Detailed historical and current data on plant performance.
Important notes:
- Bridges vary in complexity but may control 50+ processes; the equivalent of 50 single loop PID controllers.
- If more processes are to be controlled, then more than one bridge may be used.
- The bridge(s) may be located at convenient points around a plant.
- The bridge does not usually display information, nor have any buttons to press. It is simply an electronic gateway; all interaction with it is made via the PC.
Although Fieldbus is theoretically a common technology, there are differences between the products and protocols used by different manufacturers.
Names commonly encountered in Fieldbus include:

Important notes:
Fieldbus protocols and products are not directly compatible with each other. There are ways of integrating different Fieldbus’ but this can be expensive. This means that users will generally adopt one system exclusively.
- Fieldbus systems can integrate older signal based instruments (4 - 20 mA, 0 - 10 V etc.). However, signals have to be interfaced to the Fieldbus by I / O units and in doing so many (but not all) of the benefits of Fieldbus are lost.
- This means that once a particular Fieldbus system has been adopted on a plant, it is unusual for the user to even consider an alternative protocol.
As control technology advances, so does the PC. Computers are able to communicate with each other over networks (LAN – Local Area Network): Finance, Stores, Production, Marketing and Sales departments within an organisation could easily share data, and have different levels of authority to perform various tasks. Inevitably, the process control computer has been connected to the network, allowing authorised personnel to view and amend the operation of the plant from a PC in an office.
As manufacturing has become global, Wide Area Networks (WAN) have developed. Consequently, an engineer located in London could, for example, interrogate a plant computer at his company’s plant in New York.
The impact of this control and communications technology is enormous. The knowledge, expertise and equipment now exists where:
- A customer’s stores computer, responding to a ‘minimum stock’ command or a production plan, can place an order over the Internet.
- The order is received by the supplier’s computer which:
- Interrogates the stores holding for the product and despatches it, or
- Modifies the production schedule to include the order, perhaps even amending the process instructions to produce a particular product.
• The computer arranges despatch of the product and invoices the customer.
• No human intervention is required.
Benefits of Fieldbus technology
Installation:
- Reduction in system hardware - Fewer controllers and less wiring are required to control the process.
- Reduction in installation costs - Not only is there less equipment to install, the installation is simpler and quicker, consequently this means a very significant reduction in material and labour costs for installing wire, cable tray, conduit, marshalling cabinets, junction boxes, and terminal blocks.
- Less space required - Because there is less equipment and less wiring in the control room more space is available for other uses. It equally follows that there will be more space for production equipment in the plant.
- Engineering drawings - The computer automatically produces the process logic drawings, so they are always accurate and up-to-date
Operation:
- Safety - Fault state actions are embedded in the software with specific actions defined. In the event of a failure of the main computer, control falls back to the ‘local’ bridges which have independent power supplies and are programmed to default to a ‘safe mode’ relevant to the process.
- Increased process information - The amount of information available to operators and management is increased many times compared to a Distributed Control System (DCS), see Figure 5.6.9. Individual devices (such as sensors and valves) are easily interrogated, viewed and analysed. The complete process, or individual parts of the process, may be viewed and analysed to identify restrictions, capacity for improvement and so on.

- Proactive maintenance - The main computer can carry out detailed diagnostic routines, testing for sensor failure, output failure, memory failure, configuration error, communication error, valve position and valve travel time used, stick-slip action, and so on. Consequently, maintenance and calibration are based on the actual condition of the device rather than a time period, so maintenance is reduced to only that which is necessary.
Several devices can perform maintenance and calibration routines at the same time. This means fewer or shorter shutdowns, giving increased plant availability.
Time, materials and labour wasted on unnecessary maintenance is avoided, this means thatthe cost of maintenance is minimised.
- System reliability - Proactive maintenance means that equipment is well maintained.
- Quality control - Centralised control and the ability to view the process in parts or in total, improves quality control.
- Stock holding - Improved response and flexibility from the plant means that the product inventory can often be reduced.
- Spares - Because of the compatibility and interchangeability of components, the user is not tied to one component supplier, so prices are competitive. It also means that the spares inventory can be minimised, again saving costs.
- Communications - The control system or any of its components may be accessed from virtually anywhere, either over computer networks, or the Internet.
Development of a Fieldbus system
Flexibility:
- The system can easily be updated to operate with revised process requirements.
- The system can easily be expanded to take on plant expansions or new processes.
- Compatibility with other systems means that equipment can be procured at competitive prices.